
The Gyro and Accel test

posted by Pieter Jan @ 7.4.05
0 comments
![]()
This site is dedicated to reporting my progres on building an UAV based on COTS components. As a model aeroplane builder and flyer i became interrested in the mechanics of building a Autonomous Flying Model Aeroplane. Here are the results.

I received an electronic compass. the CMPS03 from robot-electronics.co.uk look for the I2C compass module.
SDA Con P8 ' Define Data pin
SCL Con P9 ' Define Clk pin
Compass Con 0xC0 ' Compass I2C Address
CmdReg Con 0 ' Compas Command register
BearingReg Con 2 ' Compas 1st Range register
Bearing Var Word ' 16 bit variable for Bearing
revision var byte ' revision of compass module
Serout S_OUT, i9600, ["Compass start", 13]
Main
pause 100
i2cin p8, p9, Err, 0xc0, 2, [Bearing.HighByte, Bearing.LowByte]
Serout S_OUT, i9600, ["Compass Bearing ", DEC Bearing/10, " graden", 13]
goto Main
Err
'Serout S_OUT, i9600, ["Compass error", 13]
goto Main

posted by Pieter Jan @ 2.4.05
0 comments
![]()
The basics.
Out_Line VAR BYTE(20)
Out_Line = "Hello World", 10, 13, 0
loop
SEROUT S_OUT, I9600, [str Out_Line\13\0]
pause 1000
goto loop
end
posted by Pieter Jan @ 2.4.05
0 comments
![]()
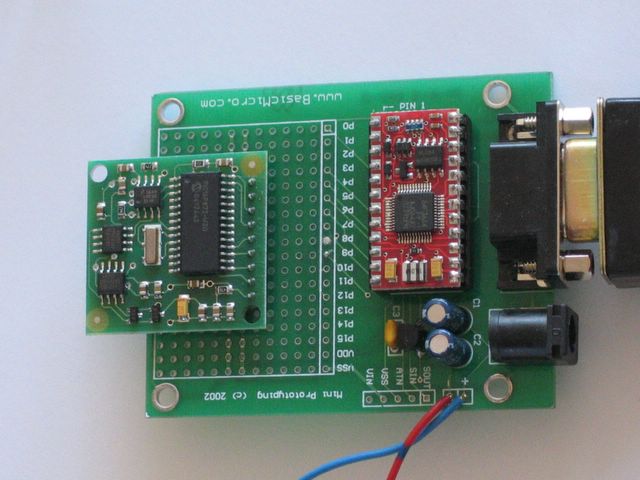
As i have what, i think, i need to start experimenting. The work begins.
DB9 female (PC) ......... DB9 male (Atom)
2 ---------------------------- 2
3 ---------------------------- 3
4 ---------------------------- 4
5 ---------------------------- 5
posted by Pieter Jan @ 2.4.05
0 comments
![]()
The final shipment of ordered goods arrived.



posted by Pieter Jan @ 1.4.05
0 comments
![]()